2020级博士研究生汪介瑜关于网联汽车预见性巡航控制的最新研究被IEEE Transactions on Intelligent Transportation Systems(简称TIST)接收。TIST是智能交通系统领域顶级学术期刊(中科院一区、公司C类推荐期刊)。
论文详情
论文题目:A Stochastic Predictive Adaptive Cruise Control System with Uncertainty-aware Velocity Prediction and Parameter Self-learning
论文作者:汪介瑜
指导教师:宫洵
收录期刊:IEEE Transactions on Intelligent Transportation Systems
论文概述:
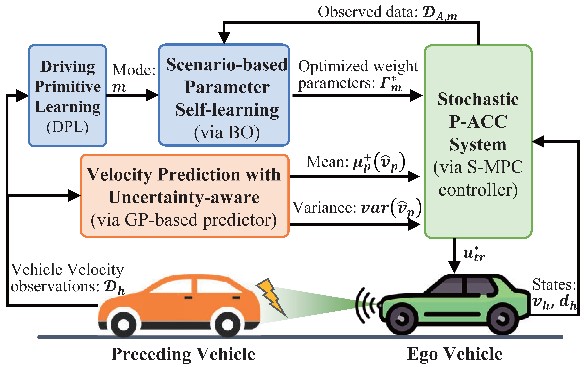
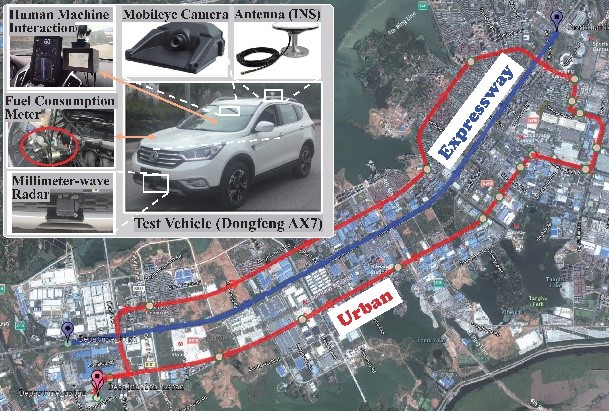
随着车联网和智能交通系统的快速发展,多源智能网联信息的赋能有望进一步提升车辆综合行驶性能。针对复杂开放环境中驾驶动态随机扰动和安全性时域约束下控制系统设计问题,本文提出了一种车载计算级的非参数化交通时序信息预测方法,建立了一种融合不确定预瞄信息的时域约束系统随机滚动时域实时优化控制框架,给出了闭环控制系统在有界扰动下的稳定性证明,发现了行驶经济性-乘坐舒适性-巡航跟踪性的帕累托前沿规律,设计了基于驾驶语义分类的控制器参数在线自适应学习算法,在高精度实车嵌入式测试平台上进行了综合评价,实现了安全性时域约束下节油优势维持以及巡航跟踪性、驾驶舒适性的多维性能提升,补齐了当前预测巡航控制技术面对随机扰动的能力短板。
|
|
随机滚动时域实时优化控制框架 |
实车嵌入式测试平台及测试路线 |


